系统组成
硬件组成
Kerloud flying rover是一款融合多旋翼无人机和陆地车的混合型平台,其基础款可视为三旋翼飞车。这里我们以scorpion系列为例,主要组件如下图所示:
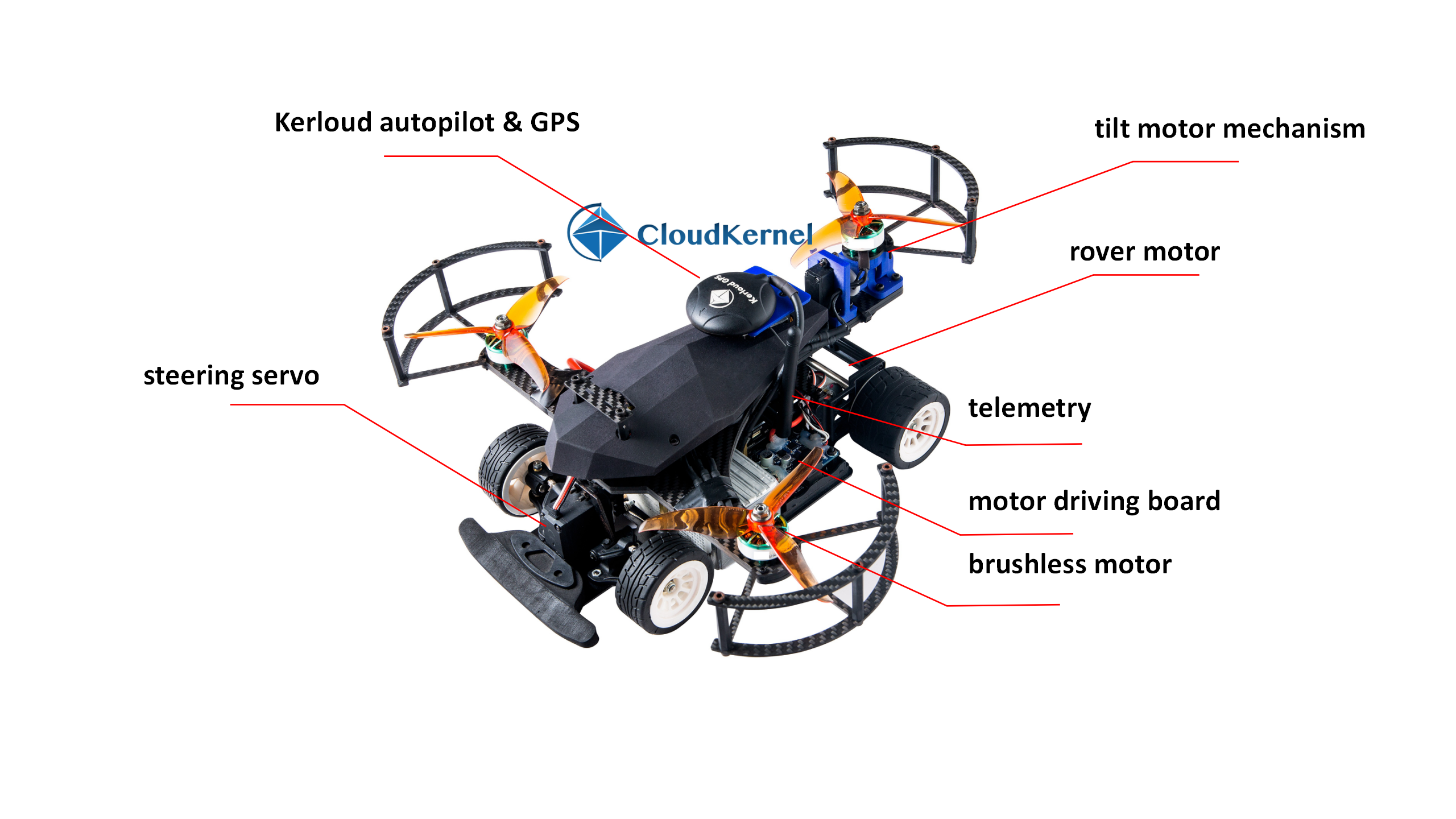
Kerloud飞控和GPS:飞行稳定、车体运动控制的核心单元
转向舵机:负责车体转向操作的大转矩伺服单元
无刷电机:多旋翼飞行模式下的推进装置
车模电机:车体推进主电机
电机驱动板:主电机的驱动单元,接收由飞控输入的PWM信号
数传:连接机载飞控、地面站的通信设备
倾转电机机构:尾部用于产生偏航扭矩的机构
Note
📌 关于Kerloud飞行控制器的详细信息参见 http://cloudkernel-tech.gitee.io/kerloud-autopilot
系统框图
飞车系统的框图示意如下:
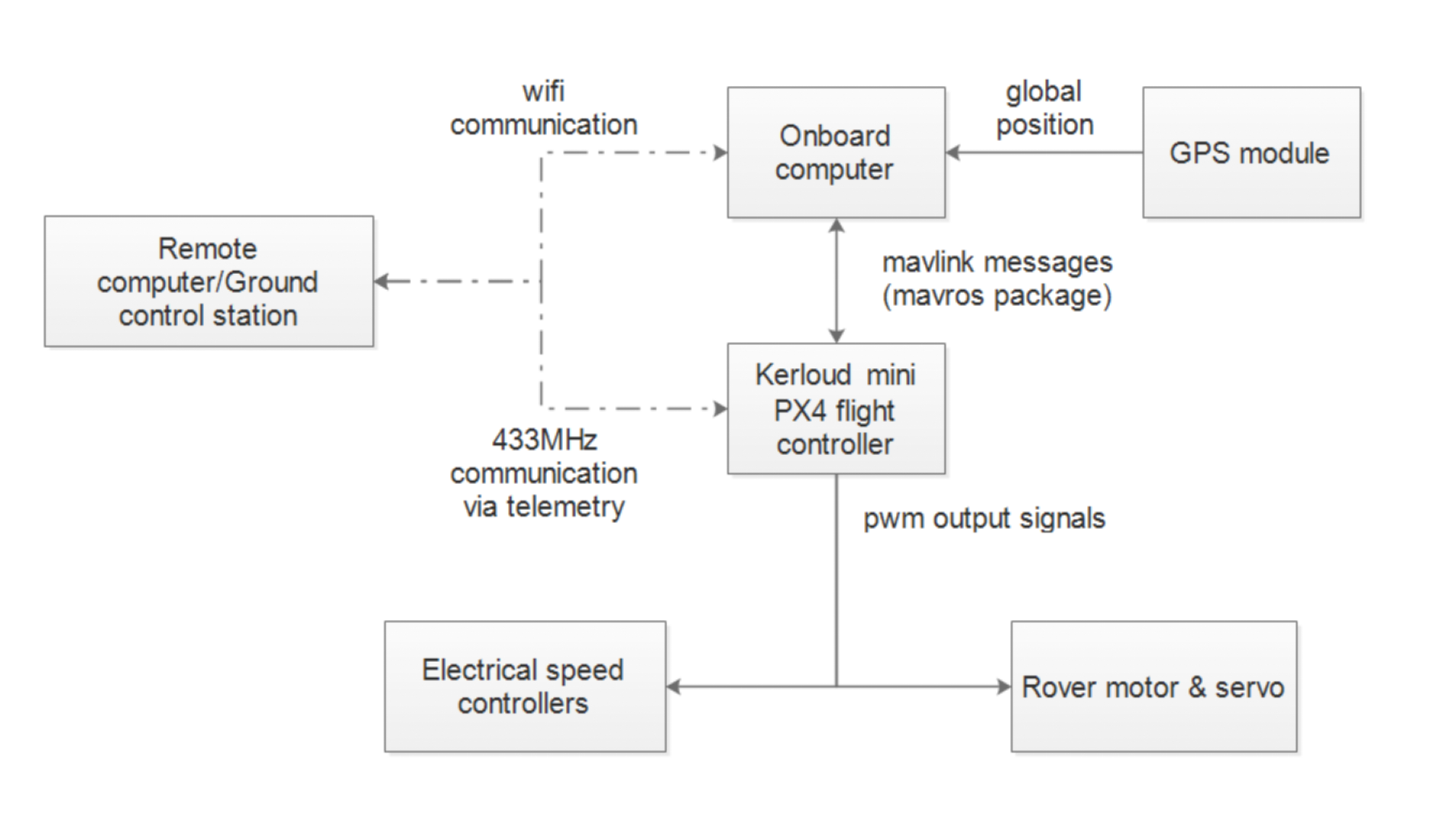
产品可搭配机载电脑进行高级应用开发,而Kerloud飞控用来为底层执行装置生成控制信号。这种系统构成背后所使用的方法与PX4社区相同。
Note
关于PX4机载电脑的设置信息参见 https://docs.px4.io/master/en/companion_computer/pixhawk_companion.html