Access the Autopilot with ROS Drivers
We provide a customized ROS package mavros (mavros, branch: dev_pursuit_agv) to interface with the Pursuit autopilot as mentioned in the API section. The package is devised for advanced developers to support extensible capabilities in the future such as IOT communication and robot simulation.
How to use mavros package
The interface with the mavros package is enabled by setting parameters as:
SER_TEL2_BAUD = 921600 # the default baud rate for mavros interface
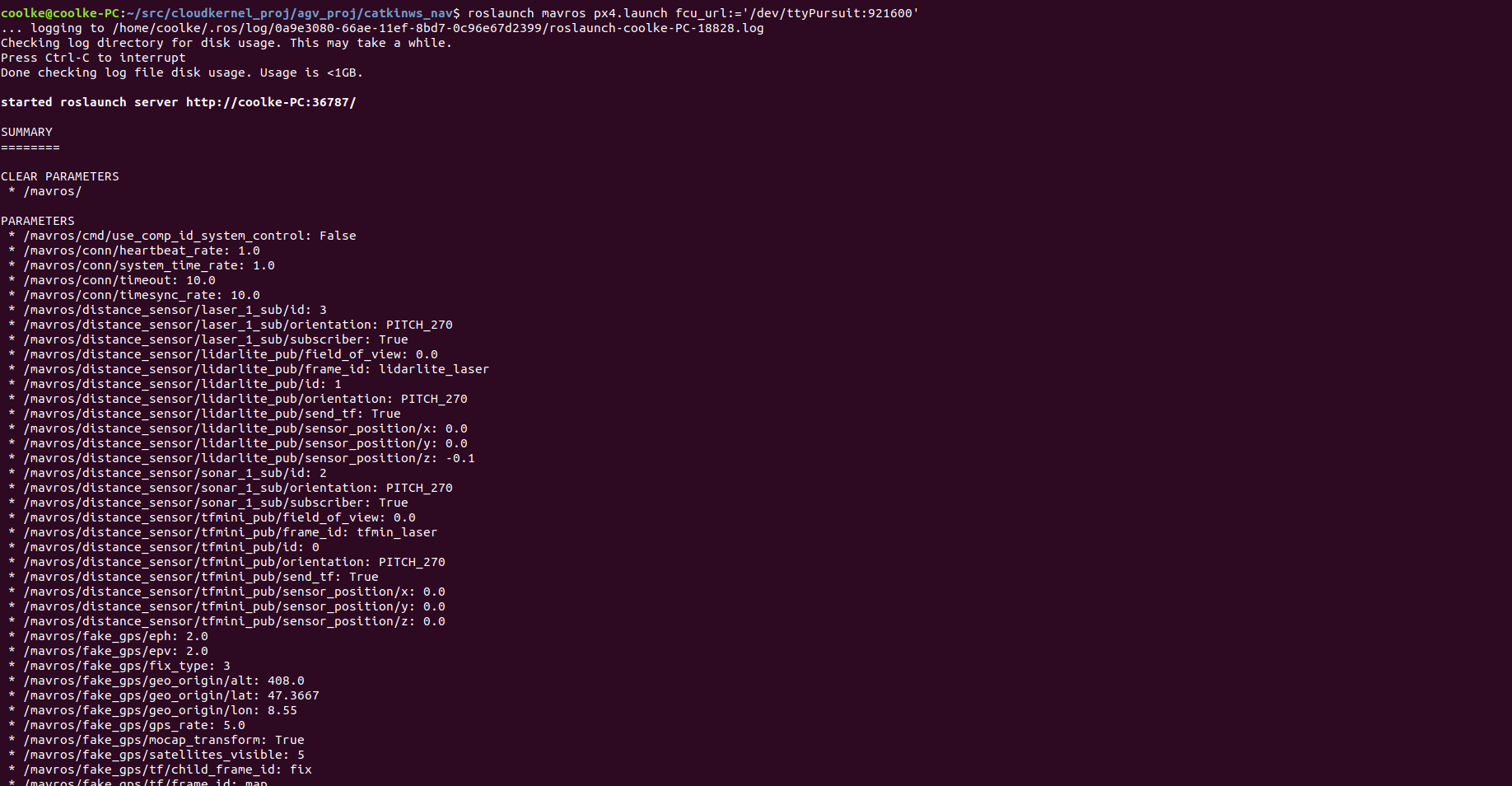
Users have to locate the USB port (the default name is /dev/ttyPursuit) for the autopilot in the companion computer, and then start the node with:
cd ~/src/catkinws_nav
source devel/setup.bash
roslaunch mavros px4.launch fcu_url:='/dev/ttyPursuit:921600'
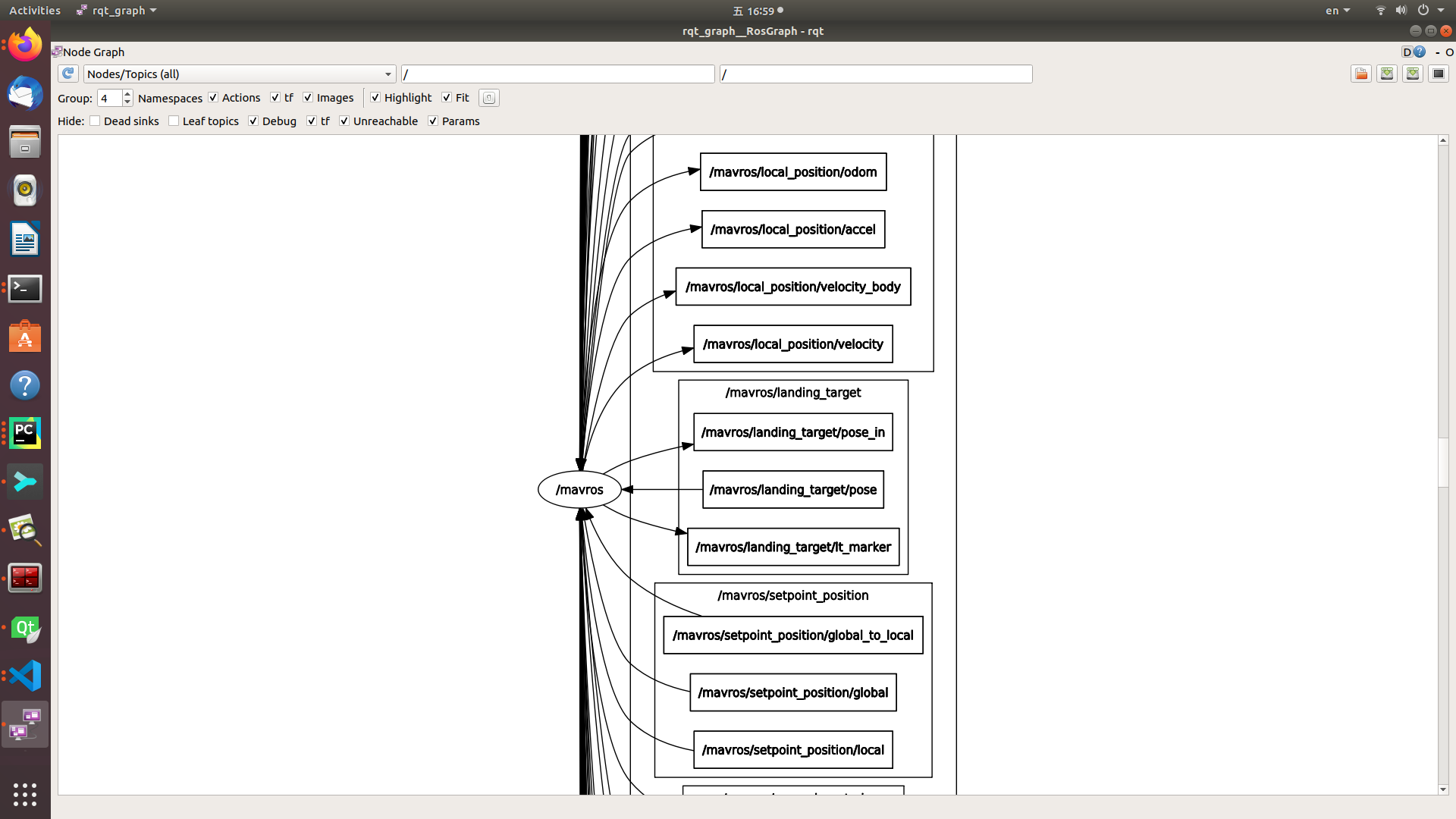
The partial view of rqt graph for mavros node is: