快速启动
Pursuit 自动驾驶仪的设计更侧重于简单的用户界面,采用平板电脑 + 触摸风格。大多数用户只需要点击和滑动按钮来执行他们的任务。以下介绍了运行配置我们Pursuit自驾仪的无人车的步骤。
软硬件工具准备
硬件工具
一台安装windows11或者ubuntu 18.04系统的计算机
Pursuit自驾仪
已经部署配套软件的无人车底盘
数传天线地面端
软件工具
Qgroundcontrol地面站软件
Pursuit专用QGC地面站发布在我司官方github页面: https://github.com/cloudkernel-tech/qgroundcontrol/releases ,并会持续更新。
windows11系统:
Ubuntu 18.04系统:
下载后用户需要执行下述指令使软件生效,并重新登录系统:
sudo usermod -a -G dialout $USER sudo apt-get remove modemmanager -y sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y # Then logout and login again to enable the change to user permissions. chmod +x ./QGroundControl_pursuit.AppImage ./QGroundControl_pursuit.AppImage
数传串口驱动(仅限windows11系统)
百度云下载链接: https://pan.baidu.com/s/1391Qkr-uLmmnIo6WG9F6qg , 提取码: gw84
任务模式(针对用户)
安装与接线
将Pursuit自动驾驶仪 用3M胶平稳粘好在车顶平面
自驾仪需要配合RTK和激光雷达使用,将RTK通过支架安装在无人车的最高处,激光雷达接到上位机
分别按要求将CAN接口、RTK接口和USB通信接口连接到底盘、RTK和上位机
给上位机供电,并使用车载12V直流电源给自驾仪上电
启动机载电脑ROS节点 (仅适用于A+或更高款型)
对于我们官方配置完成的机器,机载电脑会在启动后自动运行相关节点,具体软件与产品选项相关。对于RTK导航和自动避障功能的机型,用户也可以使用便捷脚本进行执行:
cd ~/catkinws_nav bash run_pursuit_agv_nodes.sh启动地面站软件,将数传地面端通过micro usb线连接到地面站电脑, 等待自动连接
航路点巡航任务
进入航点设置页面
添加航路点,如图所示
上传航路点,右滑解锁开启任务,无人车即按照设定的航路点运行
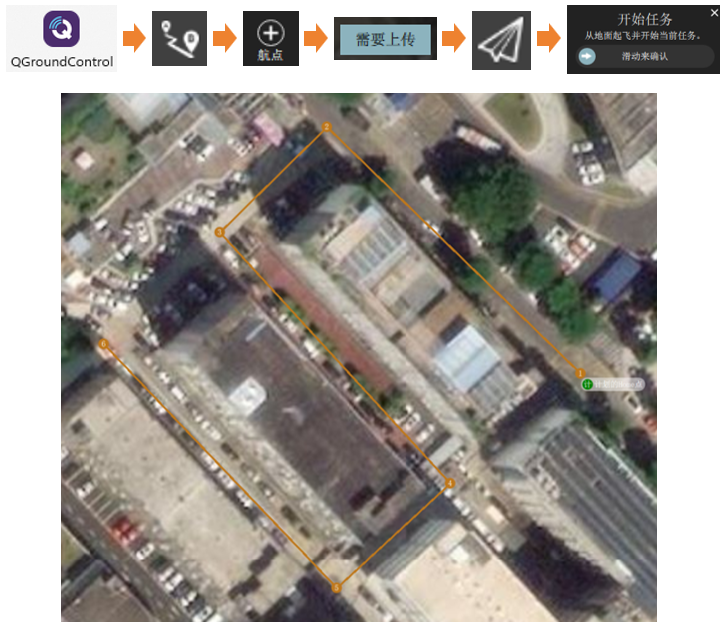
区域巡航任务
进入航路点设置页面
添加图案,创建测绘图案,框选巡航任务区域,如图所示
上传区域轨迹点,右滑解锁开启任务,无人车即按照所生成的轨迹运行

Hint